


UUVs bring underwater sensing quantity – and quality – to the naval fight.
The Euro-Atlantic maritime theatre is a significant geographic space. Across it, from the High North to the Eastern Mediterranean, are key maritime straits and choke points. Given the current contested nature of the Euro-Atlantic maritime battlespace – something evident even before conventional high-end conflict (including war at sea) broke out in Ukraine, in 2022 – there is a need to deploy sensing capability at these maritime choke points, and elsewhere, to either secure or deny access to the waters around these locations.
The contested nature of the Euro Atlantic’s maritime battlespace, and the need to secure such maritime access, points to the continuing – and increasing – importance of the underwater domain. Naval assets operating unseen in the underwater domain bring covert effect and operational deniability: a navy may, even, not risk deploying naval forces to certain waters just due to the concern that an adversary’s underwater assets might be present. In this battlespace, requirements to generate defensive capability or to deliver offensive effect all underline the importance of robust sensing capacity in supporting these outputs.
While mostly out of sight, submarines are far from out of mind in today’s Euro-Atlantic battlespace. For the last decade, senior NATO submarine commanders have been talking about the increasing presence and capability of Russia’s submarine force. Even though still mostly out of sight, during the Russo-Ukraine war Russian submarines have made high-profile deployments into key waters.

Credit: IAI/Elta Systems
In July 2022, Russia’s lead Project 885/885M Yasen class nuclear-powered attack submarine (SSN) Severodvinsk deployed from the North Sea through the Kattegat/Skagerrak maritime choke point into the Baltic Sea, heading for St Petersburg and Russia’s Naval Day parade. In the Mediterranean, various defence media sources have reported the presence of different Russian submarines types, including Kilo class diesel-electric submarines (SSKs). In the war itself, Kilo class boats in the Black Sea have fired Kalibr sea-launched cruise missiles (SLCMs) against targets ashore in Ukraine. Prior to the war, back in 2020, Russia had sailed a Project 949A Antyey/Oscar II class nuclear-powered guided-missile submarine (SSGN) into the Baltic.
Russia’s submarine capability – especially now that most of its different SSN, SSGN, and SSK types carry land-attack/anti-ship Kalibr SLCMs – now poses a different threat to NATO than in the Cold War days. Russian boats can – and do – still deploy through the Greenland-Iceland-UK (GIUK) Gap to present a ‘360-degree’ threat to NATO including with the Kalibr capability. However, the strike range provided by Kalibr means that Russian boats can also drop deeper within their own bastions (notably, the Barents Sea) and still threaten major targets at sea and ashore across the Euro-Atlantic theatre.

Credit: Portuguese Navy
Rather than an access point out into the North Atlantic (as it was for the Soviet Navy in the Cold War), Russia may see the GIUK Gap today as more of a barrier to keeping US Navy (USN) SSNs out of the Norwegian and Barents seas. Yet now that NATO submarines are already pushing further north including into the Barents Sea to generate forward presence, just as they did in the Cold War, so the Bear Island Gap – running from Norway’s Svalbard Island, down past Bear Island itself, to Norway’s North Cape – has assumed similar strategic and operational importance to the GIUK Gap.
Given the naval operational context in the Euro-Atlantic theatre, and how its maritime flanks – the High North, and the Eastern Mediterranean/Black Sea – are used by Russia to try and spread insecurity outwards from the Russo-Ukraine war, and by NATO to try to contain and constrain Russian activities at sea and ashore, the underwater activity across the theatre covers large distances; the choke points become increasingly significant in strategic terms; and NATO navies find themselves needing to generate mass across extended distances for extensive periods of time. This operational context is particularly important – and testing – in the underwater domain.
More important
Speaking at the Undersea Defence Technology (UDT) exposition, which took place at the ExCel exhibition centre in London in early April, Rear Admiral James Parkin – the UK Royal Navy’s (RN’s) Director Develop – underlined the enduring importance of the sub-surface maritime battlespace.
“Nowhere – nowhere – is more important for us than the underwater domain,” he said. For a navy like the RN, the underwater domain has strategic-level significance. Rear Adm Parkin noted that the UK’s nuclear deterrent is deployed below the surface, and that the UK relies on the underwater domain to secure sea lines of communication (SLOCs) including those on the seabed such as cables.
The UK’s deterrent, SLOCs, and critical underwater infrastructure (CUI) are all secured in large part by various underwater sensing capabilities. Underwater sensing is a multi-layered activity. However, the vast waterspaces across the Euro-Atlantic theatre stretch even the collective numbers and capability of a large alliance like NATO.

Credit: US Navy
Underwater sensing starts in the air, with maritime patrol aircraft (MPA). For NATO in the Euro-Atlantic, the predominant capability is the Boeing P-8A Poseidon MPA – with the US, UK, and Norway already deploying P-8A, and with Canada, Germany, and (possibly, although by no means definitely) Italy set to follow suit.
Surface ships bring various organic underwater sensing capabilities, including hull-mounted and towed-array sonars plus embarked anti-submarine warfare (ASW) helicopters equipped with sonar buoys and dipping sonars. The collective mass generated by NATO navies’ surface forces is significant in numbers terms. However, with some of these navies needing to project forward presence more widely around the world and to meet an increasing operational demand at home, operational numbers in Euro-Atlantic waters are still tight. The increasing North Atlantic ASW threat in particular has prompted senior NATO naval commanders to state that NATO Allied Maritime Command’s (MARCOM’s) Standing NATO Maritime Groups (SNMGs) need more ‘tail ships’ (frigates or destroyers fitted with towed-array sonars).
Below the surface, the challenge is perhaps more – and maybe even most – acute. NATO submarine numbers have dropped sharply since the Cold War, yet it is in the underwater domain where Russia has been demonstrating particular focus and development.
Speaking at the Royal United Services Institute (RUSI) Seapower conference in London in April 2023, the Royal Norwegian Navy’s (RNoN’s) then Chief of Navy Rear Admiral Rune Andersen said that, despite questions over Russian performance in its war in Ukraine, “[the RNoN doesn’t] transfer that to some of the maritime capabilities that have been prioritised for several years, in particular the submarine fleet, which is modern and capable.” “We don’t underestimate the quality or effectiveness, and we see that in our daily operations,” the admiral continued. He added that Russian Northern Fleet assets have largely been unaffected by the war, and have consequently increased in relative importance for Russia.
While NATO is largely perceived to still retain a technology and capability edge in the underwater domain, Russian developments and activities have closed this gap. Moreover, given the strategic importance of certain waters and the geographic distances involved in covering them, NATO’s submarine numbers will be increasingly stretched, especially as several key NATO submarine navies are in various stages of transitioning to new submarine fleets.
Moreover, given the contested nature of naval operations across the Euro-Atlantic theatre in the underwater domain, NATO’s submarine navies will find challenge in what it is they want their boats to do. Russia’s increasing submarine activity and capability levels across the theatre are leading the alliance’s submarine-operating navies to prioritise forward-deployed ASW operations. Yet, behind this up-threat presence remains the requirement to cover the ‘dull, dirty, and dangerous’ tasks that enable the maintenance of an extensive underwater sensing network.
This is where uncrewed underwater vehicles (UUVs) are playing an increasingly critical role for the alliance.
Why UUVs?
NATO has several different tasks it needs UUVs to cover with sensing capability.
In ASW terms, while submarines provide the forward-deployed operational output and effect, UUVs (not only AUVs, but also underwater gliders) are well suited to providing sensing barriers across choke points like the Bear Island or GIUK gaps in support of the broader, ‘dull, dirty, and dangerous’ sensing tasks.
AUVs and gliders also provide the kind of flexible and sustainable sensing capability needed to support a task like intelligence, surveillance, and reconnaissance (ISR).
Moreover, as has been demonstrated in the Black Sea during the Russo-Ukraine war, underwater sensing capability is also needed for mine countermeasures (MCM) operations. Here, both Russia and Ukraine have conducted extensive mine warfare activities to deny their adversary access to key waters. For Ukraine, with a naval surface force structure denuded by the war and during Russia’s 2014 annexation of Crimea, it currently relies on UUVs to conduct MCM operations.

Credit: US Navy
Submarines are clearly best suited to key high-end tasks including forward-deployed ASW, ISR, and indicators and warning (INW). However, as Rear Adm Parkin explained, crewed platforms have become increasingly expensive to the point that not enough of them can be acquired to meet the task requirement set against the budget available. This affects mass, said Rear Adm Parkin. “Mass wins wars,” he added.
The use of systems like AUVs and gliders underlines the increasing importance of autonomy. Rear Adm Parkin spelled out five effects that autonomous capability development should focus on in the near term, namely: scout, screen, sweep, supply, and shoot. The first three of these relate to underwater sensing.
Sensing barrier
The capability to conduct scout, screen, or sweep tasks will be core requirements for UUVs when operating across the range of key underwater sensing roles and operational tasks for which autonomous systems are well suited. Whether to picket choke points, to hem in an adversary’s submarines, or to sanitise access routes for follow-on force deployments of carrier strike groups (CSGs) or amphibious task groups (ATGs), UUVs can perform such tasks through presenting a ‘barrier’ to adversary naval capabilities.
To integrate UUV capabilities and communications to support roles like these, NATO itself has developed the ASW Smart Barrier Initiative, for which the Allied Underwater Battlespace Mission Network will provide the integrated communications architecture.
The physical communications network and associated architecture required to underpin underwater command and control (C2) must be fully coherent to enable the ‘plug and play’ concept of operations required for allied UUVs to construct and operate any such barrier. To conduct C2 of UUV-based, barrier-style operations, the network must be able to pass around the C2 directions required and pick up, process, and share the data and information needed by the operators.
NATO’s ASW Smart Barrier Initiative has been tested at the Portuguese Navy-/MARCOM-hosted ‘REPMUS’/‘Dynamic Messenger’ maritime uncrewed systems (MUS) combined exercise, which takes place in September each year off Troia, southern Portugal. The two exercises take place in tandem, running for two weeks and one week, respectively.
‘REPMUS’ developed as a Portuguese Navy-led activity to test the concepts and capabilities of new MUS technologies. Since its inception in 2010, it has grown into a significant international event. ‘Dynamic Messenger’ took place for the first time in 2022, with MARCOM’s intent being to use ‘Dynamic Messenger’ to step the concepts and capabilities tested at ‘REMPUS’ up into the operational experimentation (OPEX) realm. The escalating nature of the security challenge to NATO at sea across the Euro-Atlantic theatre in very recent years, including with the onset of war, has seen the exercises stepping up their own output. ‘REPMUS’ itself is increasingly focused on OPEX, with ‘Dynamic Messenger’ seeking to integrate MUS OPEX more regularly into operational NATO task group activities.
The output and impact of the ‘REPMUS’/‘Dynamic Messenger’ process on MUS technological, conceptual, capability, and operational developments is demonstrated by the complexity of the exercise itself. MUS of all types – uncrewed aerial vehicles (AUVs) and uncrewed surface vessels (USVs), as well as UUVs – are trialled and tested in all domains and in all the operational contexts navies currently are focused on for employing MUS capability. So, the exercises’ serials list includes ASW, CUI security, ISR, and MCM taskings.
These tactical serials are also set in wider operational context. For example, ‘REPMUS 23’ included testing the use of UUVs in conducting ASW, ISR, and MCM taskings in advance of a planned amphibious assault on a peninsula. Offshore, further ASW activities took place, building and refining multinational capabilities to be integrated into sensing barriers under the ASW Smart Barrier Initiative. Inshore, for CUI security, the exercise conducted a multi-domain CUI protection capability demonstration – incorporating UAVs, USVs, and UUVs – to locate and secure a seabed cable, and then detect and deter threats to it, drawing particularly on MUS-generated ISR information. The activity was designed to piece together not only the individual MUS system capabilities, but also their co-ordination and communication, to tackle the CUI risk.
Credit: IAI/Elta Systems
Overlaying all these activities was a focus on developing an effective C2 network, including the underpinning architecture and the associated system and communications design and network standards (bringing a focus on developing the appropriate standardisation agreements [STANAGs]).
Underwater sensing played a crucial role across the exercises’ operational activities. In remarks at the opening ceremony of the Distinguished Visitor Day, which took place at the overlap of the two exercises, Vice Admiral Mike Utley – MARCOM’s Commander, and an RN officer – underlined the important role of MUS in delivering sensing output, including in the underwater battlespace.
“We need improved persistence and understanding. We have threats to our CUI, improving threats in mine warfare, as well as some traditional ones in ASW and in the air,” Vice Adm Utley said. “Plus, we have the multi-domain aspects, which more than ever require us to understand our battlespace.”
MUS capability
According to NATO, more than 90 MUS demonstrated their capability at ‘REPMUS’ itself. This number included more than 40 UAVs, more than 15 USVs, and more than 35 UUVs.
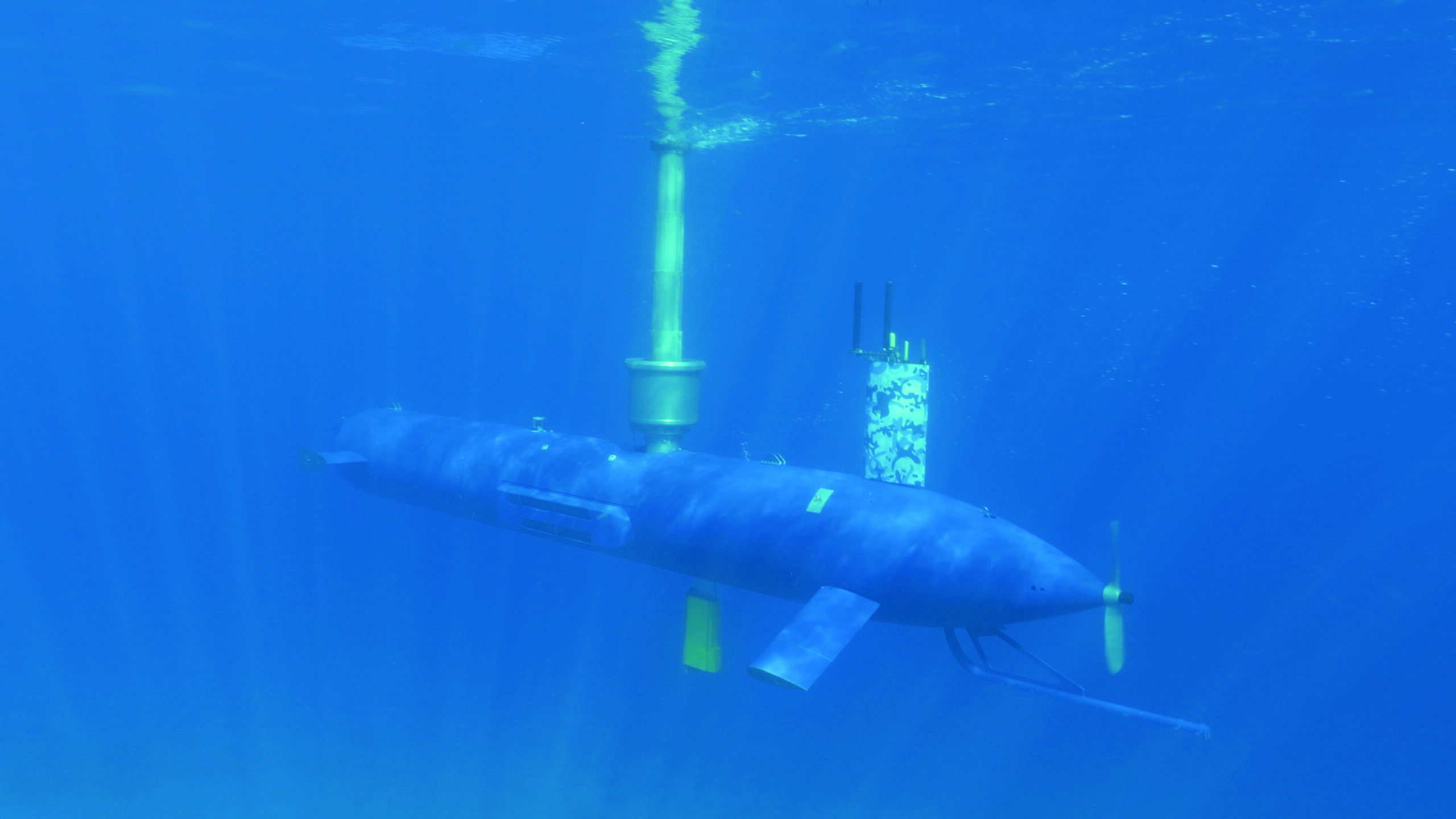
Amongst the UUVs present was the IAI/ELTA BlueWhale (ELI-3325) autonomous submarine system.
According to an IAI factsheet, BlueWhale is designed for high-endurance, low-profile missions, supporting ASW, ISR, and MCM tasks, and can operate in “hard-to-access littoral waters, choke points, and open seas”. It can also conduct forward scouting missions to support submarine and special forces operations.
The factsheet added that BlueWhale can conduct detection and targeting of surface and sub-surface targets, perform onboard data processing, and distribute information in real-time. Mission endurance is between two and four weeks, depending on the operational requirements. BlueWhale is rated to a depth of 300 m. When submerged, its maximum speed is 7 kt, with an operational speed of 2-3 kt. The vehicle is air-, land-, and sea-deployable, using a 40-ft shipping container.
To support the sensing and communications task, the 10.9 m, 5.5-ton BlueWhale UUV is fitted with radar, EO/IR, signals intelligence (SIGINT), SATCOM, magnetic sensors, and flank and towed sonars. BlueWhale shares the information it gathers via its SATCOM system, when deployed at periscope depth. The SATCOM system is housed in the vehicle’s deployable mast, within which sensors are fitted and secured.
For ‘REPMUS’/‘Dynamic Messenger’, the towed array sonar fit was an Atlas Elektronik ASW-2500 system. BlueWhale was deployed to the exercise to support the ASW serials.
“The idea is trying to emulate as much as possible the intelligence-gathering capability of submarines,” Udi Erell – Naval Specialist at ELTA Systems Ltd – told the UDT conference. The reason for this, he explained, is to add mass, with only limited submarine numbers being available.
BlueWhale was first unveiled in early 2023. Erell noted that a first step in its development was adding the SATCOM capability, and the second was working with Atlas Elektronik to add the towed sonar capability.
The Atlas ASW-2500 towed-array system is a low-frequency, passive sonar, with the ASW-2500-A system being the transmitter and ASW-2500-P being the receiver. The passive sonar provides detection, classification, and tracking, while an active source is added to assist submarine detection, Lisa Trunk – Atlas Elektronik’s Autonomous ASW Programme Manager – told the conference.
The 17 mm-diameter towed array has a 20 m-long acoustic section. The array can be deployed down to a 500 m depth.
Combining BlueWhale and the towed array provided a new capability, Sela Meyouhas – an underwater sensor specialist, and ELTA’s Autonomous ASW Project Manager – added.
For the exercise, he continued, the objective was to demonstrate and prove autonomous detection, tracking, and reporting. The dynamic test targets were a Saab AUV62-AT ASW target trainer (provided for the exercise by FMV, Sweden’s defence procurement agency) and a Teledyne Gavia AUV (provided by the Royal Danish Navy). A Portuguese Navy submarine and offshore patrol vessel were also present for the serials.
The ASW exercise area, west of Troia and south of Sesimbra, presents challenging acoustic sensing conditions, with the Setubal Canyon bringing a deep drop-off.
The target AUVs deployed at 80 m depth at 4-6 kt speeds, using echo repeating modes for bi-static sonar detection, with a pre-programmed passive setting also used to create the effect of onboard machinery noise. The AUVs transited from west to east, while BlueWhale operated from north to south – effectively providing an ASW barrier, Meyouhas explained. With its towed array deployed at 60 m, BlueWhale was able to continuously track the AUV62-AT target, for example. Track data was transmitted in real-time to a ground control station.
BlueWhale also undertook a bi-static active sonar run with the Portuguese submarine, which transited up from south of the Setubal Canyon. Again, BlueWhale was able to detect the target, said Meyouhas.
Overall, the BlueWhale vehicle was successful in both autonomous passive detection and autonomous bi-static detection and tracking. This proved its capability to conduct autonomous ASW. “BlueWhale is … a vehicle that can support ASW operations, and support an ASW force,” said Meyouhas.
BlueWhale also conducted ISR operations in support of the amphibious assault, including deploying its mast sensors to provide a live sweep of the landing area in advance of the assault.
Dr Lee Willett








